Name: Marvin
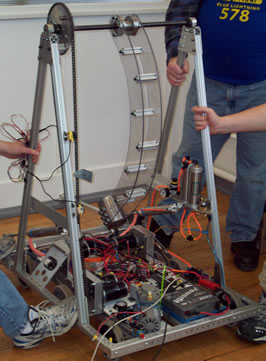
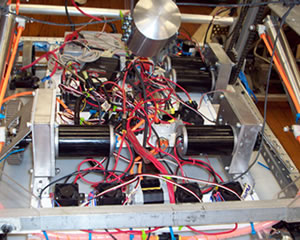
The boot: A 12 pound weight mounted on a curved lexan arm. The weight catches the ball on the bottom and launches it over. It is powered by 2 CIM motors that are hooked up to a gear box with a sprocket. From there a chain pulls another sprocket which twists up the boot. The opposite fires the boot. As a safety precaution, the weight is bolted to a metal wire and attached to the shaft it's mounted on. a stop function along with raise and fire which allows the operator to lower the boot, while keeping the boot safely within the robot's area.
The Lifter: powered by 2 2” pneumatic pistons with 8” stroke.
The Drive Train: has 2 drive friction wheels and 4 driven wheels. The drive wheels are driven by 1 CIM motor each with the same gear box as our motor. We use a tank drive with our controls and turning. We can drive about # fps. We can hurdle the ball about 2-3 times within 2 minutes, if we carry the ball all the way around the track. Plus we can drive around and dodge through other’s robot effectively with our tank steering. It takes us little time to actually hurdle the ball. We can capture the track ball without using the wall.
We would like to have a robot that can place the ball onto the rack at the end for the bonus points on our team or a robot who can move the ball around the track quickly to supply us with another ball to shoot.
|